Research!
My area of work in PhD is tracking. This is an active area in Computer Vision and has been so for a long time. This is because the task is tracking consists of many sub-problems and approaches. Also, people more or less agree that there is no "silver bullet" tracker which will perform well in all scenarios. The idea is to design a tracker for a particular scenario. An excellent recent review of tracking is by Yilmaz et al.
Regarding implementation, I have used OpenCV for all my coding. This is a very stable library, gaining rapidly in popularity. It can be downloaded from the Sourceforge site.If need be, I can share the code; feel free to contact me if you think the code could be useful for you.
Keeping this in mind, our approach is to use contours for tracking. The advantage is that the obtained silhouette is a very good descriptor for activity analysis applications. For implementing the contours, we used the B Splines; the advantages being speed and ease of implementation. Compared to the level set framework, the disadvantage is that topology change is not possible without special and cumbersome procedure. We however assume that topology change does not occur for our applications; we do not expect a person to split into two! Our first work is on stabilisation of active contours, as described next.
A. Stabilisation of Parametric Active Contours
Parametric contours have an interesting implementation problem. This is best observed in the image below. The image shows the segmentation of the hand using the region based active contour model of Zhu and Yuille. The yellow curve is the initialisation and the blue cuve shows the final curve. The segmentation has is not good because of the looping of the contour.
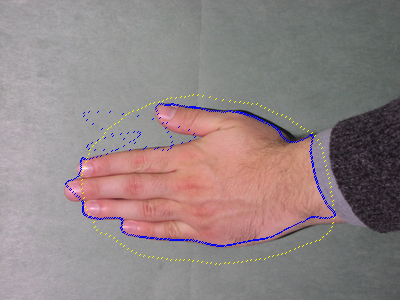
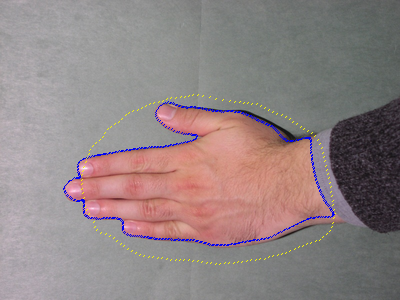
This is a very common problem with parametric active contours. The reason for this is that the spacing of the points does not remain uniform as the contour evolves. Curve point distance increases in some parts of the curve while reducing in other parts. For B Splines, this bunching of points leads to formation of loops, because the control points also come closer together. We have proposed an ODE to control the spacing of the the curve points. This stabilises the curve, in the sense that the uniform spacing between the curve points is maintined throughout the evolution. This ODE determines the tangential component of the curve evolution, and it has been shown that the proposed tangential term is bounded and hence numerically stable. Using the proposed tangential term, we get the following segmentation,
Publications arising from the above work: Note that all rights are with the publishers.
1. V. Srikrishnan, S. Chaudhuri and S. Dutta Roy, "Stabilisation of Active Contours Using Tangential Evolution Term: An application to Tracking", Proc. ICCTA, Kolkata, March 2007
2. V. Srikrishnan, S. Chaudhuri, S. Dutta Roy and D. Sevcovic, "On Stabilisation of Parametric Active Contours", Proc. CVPR, Minneapolis, June 2007.
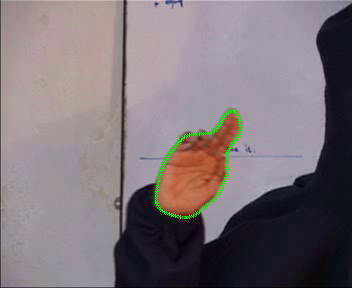
Some more results: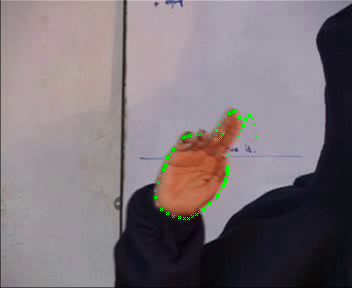
We are now working on incoporating shape priors and appearance model for contours.
B. Combination of Mean Shift and Contour based tracker
As is well known, the mean shift tracker is very fast. It has three major problems, firstly that no shape information is generated. More importantly, the base mean shift tracker does not encode appearance information well. Finally, the bandwidth problem is well known in literature, that is, how do we set the size and orientation of the bounding ellipse?On the other hand, the contour based tracker is very slow. Therefore, we try to utilise the benefits of each tracker to overcome the disadvantage of the other. We use the mean shift approach to move the contour for translational motion. Then, in the new position the contour evolution proceeds as per the energy functional. This final convergence of the contour provides the initialisation of the mean shift for the next frame.
Publication:
V. Srikrishnan and S. Chaudhuri, ``Kernel Snake: A Cooperative Shape Tracking Paradigm", Proc. National Conf. Communication (NCC), IIT Mumbai, India, Jan 2008. (pdf)
© 2007 V. Srikrishnan | Design by Andreas Viklund